- Jun 2025: One paper has been accepted to IROS 2025.
- Feb 2025: One paper has been accepted to International Journal of Advanced Manufacturing Technology[IJAMT]
- Sep 2024: One paper has been accepted to ICCMA 2024 as an oral presentation.

Haegu Lee
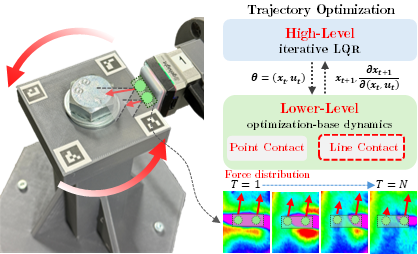
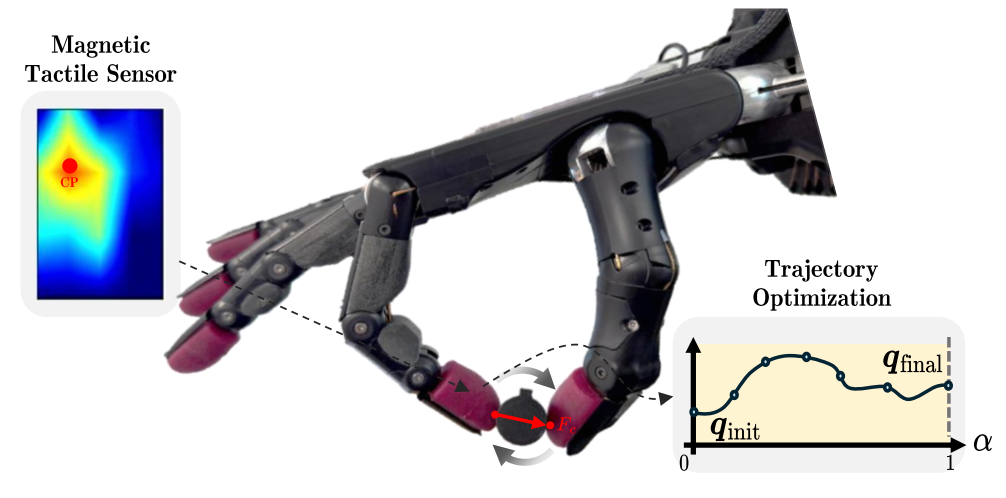
I am a PhD student in robotics, working on contact-rich manipulation and control. My research focuses on force-distributed contact models, trajectory optimization, and sim-to-real transfer for robotic manipulation.
I am currently pursuing my PhD at University of Southern Denmark(SDU). My research interests are primarily in robotics, control, and learning-based methods.